╦─▀BŚU┬─Ħ╩Į╦čŠ╚ÖCŲ„╚╦«ģśIįOėŗ
- ╬─╝■ĮķĮBŻ║
- įō╬─╝■×ķ rar Ė±╩ĮŻ©į┤╬─╝■┐╔ŠÄ▌ŗŻ®Ż¼Ž┬▌dąĶę¬
20 ĘeĘų
-
- š¬ ę¬
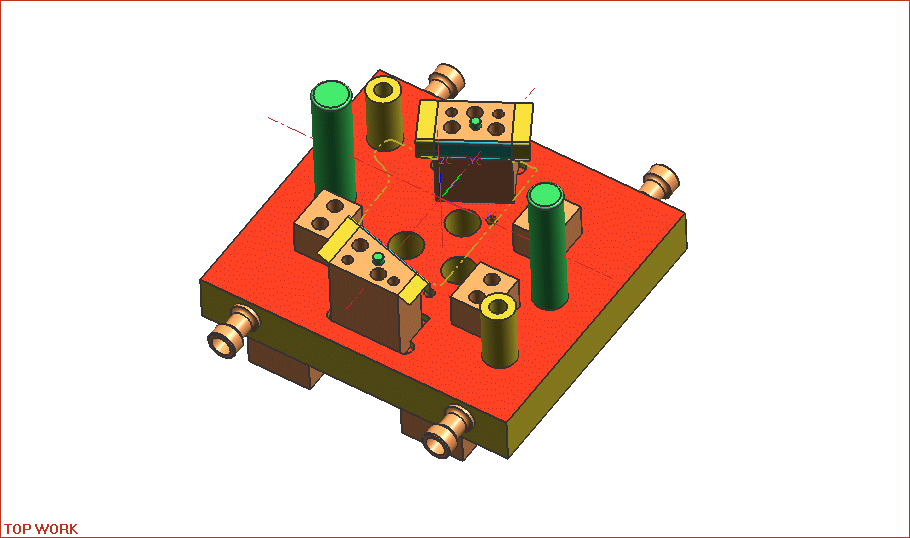
╦─▀BŚUūāą╬┬─Ħ╩ĮÖCŲ„╚╦ĮYśŗ▓╝Šų, ų„ę¬ė╔ÖC╝▄║═ā╔éĆī”ĘQĘų▓╝Ą─┬─Ħūāą╬─ŻēKĮM│╔ĪŻ╬╗ė┌ÖCŲ„╚╦ųą▓┐Ą─ÖC╝▄ū„×ķęŲäėŲĮ┼_┐╔čb▌dų▒┴„ļŖį┤╝░┼c┐žųŲŽÓĻPĄ─Ė„ĘNįOéõ, ė├ė┌═Ļ│╔Ė„ĘN╠žČ©Ą─╚╬äš, į┌ÖCŲ„╚╦▀\äė▀^│╠ųąę╗░Ń▒Ż│ų╦«ŲĮĪŻÖC╝▄ā╔é╚╩Ū╗∙ė┌ŲĮąą╦─▀ģą╬ĮYśŗĄ─┬─Ħūāą╬─ŻēK, ų„ę¬ė╔╦─▀BŚUūāą╬ÖCśŗĪóų„“īäė▌åĪó▒╗äė▌å╝░└@į┌┬─Ħ▌å╔ŽĄ─┬─ĦĮM│╔, Ųõųą╦─▀BŚUūāą╬ÖCśŗė╔▀BŚUĪóų„äėŪ·▒·Īó▒╗äėŪ·▒·ĮM│╔, ė├ė┌╠ß╣®“īäė┴”, ▓óŪę┐╔ęį└@ÖC╝▄ą²▐D, īŹ¼F┬─Ħūāą╬, į┌įĮšŽĢrĮoÖCŲ„╚╦╠ß╣®Ņ~═ŌĄ─▌oų·▀\äėĪŻÖCŲ„╚╦╣▓ėą3éĆūįė╔Č╚, ╝┤ę╗éĆŲĮäėūįė╔Č╚║═ā╔éĆą²▐Dūįė╔Č╚ĪŻ░▓čbį┌ÖCŲ„╚╦ā╔éĆų„“īäė▌åā╚Ą─ļŖÖC═©▀^┬ō▌SŲ„é„äė, īóų„“īäė▌åĄ─ą²▐D▀\äė▐Dūā×ķ┬─ĦĄ─ŲĮęŲ▀\äė, īŹ¼FÖCŲ„╚╦Ą─ų▒ŠĆŪ░▀MĪó║¾═╦║═▐DŽ“ĪŻ┴Ē═Ōę╗éĆļŖÖC░▓čbį┌ÖC╝▄╔Ž, ═©▀^µ£é„äė“īäėū¾ėęā╔é╚┬─Ħūāą╬─ŻēKųąĄ─ų„äėŪ·▒·└@╬╗ė┌ÖC╝▄Ū░ĘĮĄ─▌S▐Däė, Å─Č°īŹ¼F╦─▀BŚUÖCśŗĄ─ūāą╬, ūŅĮK╩╣└@į┌Ųõ╦─ų▄Ą─┬─Ħśŗą╬░l╔·ūā╗»ĪŻįōĮYśŗĄ─╠ž³cį┌ė┌Ū╔├ŅĄž└¹ė├╦─▀BŚUÖCśŗīŹ¼F┴╦ÖCŲ„╚╦Ą─ąą▀M┼c┬─ĦĄ─ūāą╬, ╩╣ÖCŲ„╚╦Š▀éõ┴╝║├Ą─įĮšŽąį─▄║═Ąž├µ▀mæ¬ąįĪŻ
ĻPµIį~Ż║ ŲĮąą╦─▀ģą╬ ╦─▀BŚUūāą╬┬─Ħ╩ĮÖCŲ„╚╦ įĮšŽ
...
 ¤ßķTĻPµIį~Ż║
¤ßķTĻPµIį~Ż║


 įź╣½ŠW░▓éõ 41072402000322╠¢
įź╣½ŠW░▓éõ 41072402000322╠¢