X-Y數(shù)控工作臺(tái)設(shè)計(jì)論文
- 文件介紹:
- 該文件為 doc 格式(源文件可編輯),下載需要
20 積分
-
- X-Y數(shù)控工作臺(tái)設(shè)計(jì)論文
一、總體方案設(shè)計(jì)
1.1 設(shè)計(jì)任務(wù)
設(shè)計(jì)一個(gè)數(shù)控X-Y工作臺(tái)及其控制系統(tǒng)。該工作臺(tái)可用于銑床上坐標(biāo)孔的加工和臘摸、塑料、鋁合金零件的二維曲線加工,重復(fù)定位精度為±0.01mm,定位精度為0.025mm。
設(shè)計(jì)參數(shù)如下:負(fù)載重量G=150N;臺(tái)面尺寸C×B×H=145mm×160mm×12mm;底座外形尺寸C1×B1×H1=210mm×220mm×140mm;最大長(zhǎng)度L=388mm;工作臺(tái)加工范圍X=55mm,Y=50mm;工作臺(tái)最大快移速度為1m/min。
1.2 總體方案確定
(1)系統(tǒng)的運(yùn)動(dòng)方式與伺服系統(tǒng)
由于工件在移動(dòng)的過(guò)程中沒(méi)有進(jìn)行切削,故應(yīng)用點(diǎn)位控制系統(tǒng)。定位方式采用增量坐標(biāo)控制。為了簡(jiǎn)化結(jié)構(gòu),降低成本,采用步進(jìn)電機(jī)開(kāi)環(huán)伺服系統(tǒng)驅(qū)動(dòng)X-Y工作臺(tái)。
(2)計(jì)算機(jī)系統(tǒng)
本設(shè)計(jì)采用了與MCS-51系列兼容的AT89S51單片機(jī)控制系統(tǒng)。它的主要特點(diǎn)是集成度高,可靠性好,功能強(qiáng),速度快,有較高的性價(jià)比。
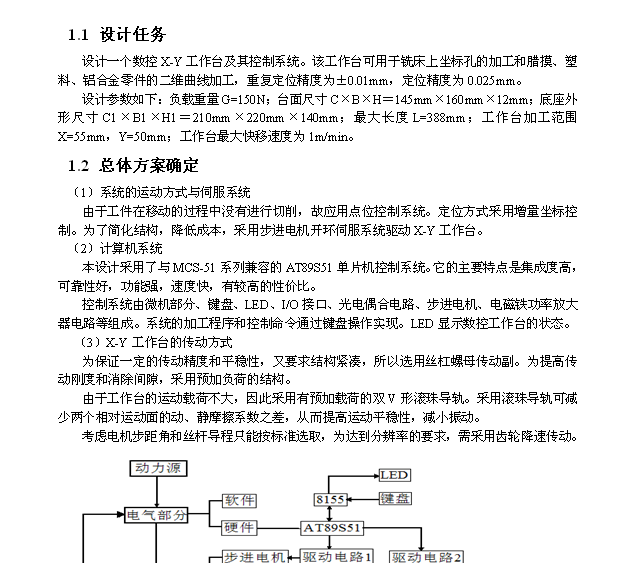
控制系統(tǒng)由微機(jī)部分、鍵盤(pán)、LED、I/O接口、光電偶合電路、步進(jìn)電機(jī)、電磁鐵功率放大器電路等組成。系統(tǒng)的加工程序和控制命令通過(guò)鍵盤(pán)操作實(shí)現(xiàn)。LED顯示數(shù)控工作臺(tái)的狀態(tài)。
(3)X-Y工作臺(tái)的傳動(dòng)方式
為保證一定的傳動(dòng)精度和平穩(wěn)性,又要求結(jié)構(gòu)緊湊,所以選用絲杠螺母?jìng)鲃?dòng)副。為提高傳動(dòng)剛度和消除間隙,采用預(yù)加負(fù)荷的結(jié)構(gòu)。
由于工作臺(tái)的運(yùn)動(dòng)載荷不大,因此采用有預(yù)加載荷的雙V形滾珠導(dǎo)軌。采用滾珠導(dǎo)軌可減少兩個(gè)相對(duì)運(yùn)動(dòng)面的動(dòng)、靜摩擦系數(shù)之差,從而提高運(yùn)動(dòng)平穩(wěn)性,減小振動(dòng)。
考慮電機(jī)步距角和絲桿導(dǎo)程只能按標(biāo)準(zhǔn)選取,為達(dá)到分辨率的要求,需采用齒輪降速傳動(dòng)。
圖1-1 系統(tǒng)總體框圖
二、機(jī)械系統(tǒng)設(shè)計(jì)
2.1、工作臺(tái)外形尺寸及重量估算
X向拖板(上拖板)尺寸:
長(zhǎng)寬高 145×160×50
重量:按重量=體積×材料比重估算
N
Y向拖板(下拖板)尺寸:
重量:約90N。
上導(dǎo)軌座(連電機(jī))重量:
夾具及工件重量:約150N 。
X-Y工作臺(tái)運(yùn)動(dòng)部分的總重量:約287N。
2.2、滾動(dòng)導(dǎo)軌的參數(shù)確定
⑴、導(dǎo)軌型式:圓形截面滾珠導(dǎo)軌
⑵、導(dǎo)軌長(zhǎng)度
①上導(dǎo)軌(X向)
取動(dòng)導(dǎo)軌長(zhǎng)度
動(dòng)導(dǎo)軌行程
支承導(dǎo)軌長(zhǎng)度
②下導(dǎo)軌(Y向)
選擇導(dǎo)軌的型號(hào):GTA16
⑶、直線滾動(dòng)軸承的選型
①上導(dǎo)軌
②下導(dǎo)軌
由于本系統(tǒng)負(fù)載相對(duì)較小,查表后得出LM10UUOP型直線滾動(dòng)軸承的額定動(dòng)載荷為370N,大于實(shí)際動(dòng)負(fù)載;但考慮到經(jīng)濟(jì)性等因素最后選擇LM16UUOP型直線滾動(dòng)軸承。并采用雙排兩列4個(gè)直線滾動(dòng)軸承來(lái)實(shí)現(xiàn)滑動(dòng)平臺(tái)的支撐。
⑷、滾動(dòng)導(dǎo)軌剛度及預(yù)緊方法
當(dāng)工作臺(tái)往復(fù)移動(dòng)時(shí),工作臺(tái)壓在兩端滾動(dòng)體上的壓力會(huì)發(fā)生變化,受力大的滾動(dòng)體變形大,受力小的滾動(dòng)體變形小。當(dāng)導(dǎo)軌在位置Ⅰ時(shí),兩端滾動(dòng)體受力相等,工作臺(tái)保持水平;當(dāng)導(dǎo)軌移動(dòng)到位置Ⅱ或Ⅲ時(shí),兩端滾動(dòng)體受力不相等,變形不一致,使工作臺(tái)傾斜α角,由此造成誤差。此外,滾動(dòng)體支承工作臺(tái),若工作臺(tái)剛度差,則在自重和載荷作用下產(chǎn)生彈性變形,會(huì)使工作臺(tái)下凹(有時(shí)還可能出現(xiàn)波浪形),影響導(dǎo)軌的精度。 ...
 熱門(mén)關(guān)鍵詞:
熱門(mén)關(guān)鍵詞:


 豫公網(wǎng)安備 41072402000322號(hào)
豫公網(wǎng)安備 41072402000322號(hào)